取扱機器
協働ロボット・システム.comで取り扱いの協働ロボット・メーカーは、ユニバーサルロボット(Universal Robots)、川崎重工業、ABBとなります。
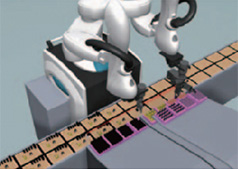
協働ロボット - 川崎重工業 duAro
協働型双腕スカラロボット

簡単設置
アームを設置した台車の中にコントローラも収納、台車ごと移動できる為、設置、移動が簡単
簡単教示
アームを持ってのダイレクト教示により簡単に動作の教示を行うことが可能
省スペース
同軸構造で人一人分のスペースに設置することが可能
様々なアプリケーションに対応!!
一人分のスペースで設置可能!
一人分のスペースで設置可能!

人と共存する作業範囲を設定
duAroの片腕は人の作業範囲とほぼ同じ最長76cm。
人と共存することを前提に設計されています。

ライン変更なしにロボット投入が可能
人ひとり分のスペースに設置できるため、ロボットのためのライン変更は必要ありません。

衝突検知機能を搭載
作業中にduAroと接触・衝突を検知して停止します。

協働ロボットで双腕スカラはduAroだけ!!
抜群のコストパフォーマンス!!
ビジョン機器は全てduAroに内蔵・取り付けが可能なので、duAro移動時も配線しなおす必要はありません。

操作パネルはandroid対応のタブレット!
簡単にプログラムを組むことが可能です。

※ディスプレイ、マウス、キーボードは付属しておりません。
必要時にはお客様にて別途ご準備ください。

ネジ締め
異形部品挿入

基板検査装置へのロード、アンロード
基盤チャックによる機種対応事例
| 適用用途 | 組立 ハンドリング ロードアンロード シーリング | ||
|---|---|---|---|
| 動作自由度(軸) | 各アーム 4 | ||
| 最大可搬質量(kg) | 各アーム 2(両アームでは4) | ||
| 位置繰り返し精度(mm) | ±0.05 | ||
| アーム1(下アーム) | アーム2(上アーム) | ||
| 最大ストローク | 腕旋回(°) | 170 – +170(JT1) | ‒140 – +500(JT1) |
| 腕旋回(°) | ‒140 – +140(JT2) | ‒140 – +140(JT2) | |
| 腕上下(mm) | 0 – +150(JT3)*1 | 0 – +150(JT3)*1 | |
| 手首回転(°) | 360 – +360(JT4)*1 | ‒360 – +360(JT4)*1 | |
| 制御軸数(軸) | 最大12 | ||
| 駆動方式 | フルデジタルサーボ | ||
| 動作方式 | マニュアルモード | 双腕協調動作、単腕独立動作、【補間モード】各軸、ベース座標、ツール座標 | |
| オートモード | 双腕協調動作、単腕独立動作、【補間モード】各軸補間、直線補間 | ||
| 教示方式 | ダイレクト教示方式、タブレットによる簡易教示方式 | ||
| 記憶容量(MB) | 4 | ||
| I/O信号 | 汎用入力(点)*2 | NPN仕様:12(最大28) / PNP仕様:6(最大16) / Cubic-S仕様:6(最大16) | |
| 汎用出力(点)*2 | NPN仕様:4(最大12) / PNP仕様:10(最大24) / Cubic-S仕様:0(最大14) | ||
| 電源仕様 | AC200-240V 50/60Hz±2% 単相、最大2.0kVA D種接地(ロボット専用接地) 漏れ電流最大10mA以下 | ||
| 本体質量(kg) | 約200 | ||
| 設置方法 | 床置き | ||
| 設置環境 | 周囲温度(℃) | 5 – 40 | |
| 相対湿度(%) | 35 – 85(但し、結露なきこと) | ||
※速度制限解除によりサイクルタイムアップが可能(安全柵が必要となります)
*1:お客様にてコンバージョンされた場合は仕様が異なります。
*2:専用信号占有部を除きます。最大信号数はオプション対応となります。