取扱機器
協働ロボット・システム.comで取り扱いの協働ロボット・メーカーは、ユニバーサルロボット(Universal Robots)、川崎重工業、ABBとなります。
協働ロボット - 川崎重工業 duAro2
双腕スカラロボット

人との共存作業
安全を担保するための様々な機能や柔らかな表面材料の採用等により、人との共存、協働作業が可能です。
万一ロボットが衝突しても、衝突検知機能がロボットを停止させ、事故を防止します。
上下ストローク(Z軸)を550mmに拡大
上下ストロークを150mmから550mmに拡大したため、深い箱への箱詰め作業などの適用範囲が大幅に広がりました。
可搬質量を3kgにパワーアップ
可搬質量を2kgから3kg(両腕で6kg)にパワーアップしたため、適用できる作業が増えました。
ビジョン機能が手軽に利用可能
ソフトフェアを追加(オプション)するだけで、ビジョンセンサが利用できるため、ビジョン用にコントローラを別途用意する必要がありません。
本体とコントローラ部の分離が可能
アーム本体とコントローラの一体型に加え、アーム本体とコントローラを分離可能としたため、現場レイアウトの自由度が向上しました。
動作範囲と寸法
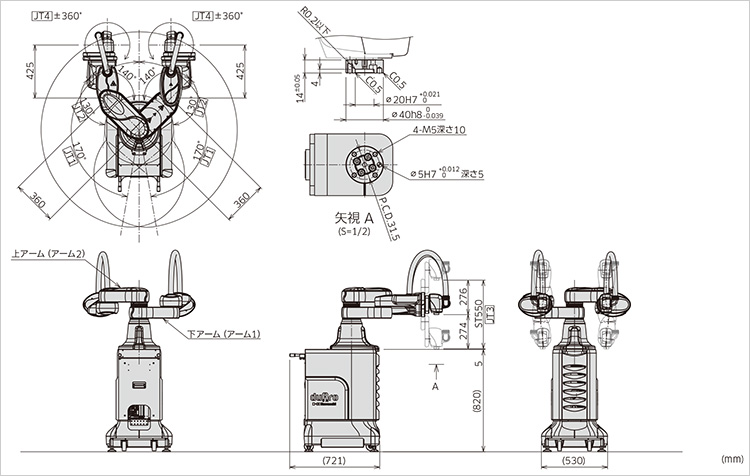
分離オプション

適用例
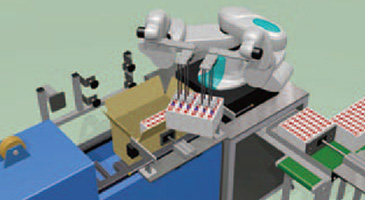
完成品の出荷前梱包

実装基板の検査
| 適用用途 | 組立 搬送 塗布 | ||
|---|---|---|---|
| 動作自由度(軸) | 各アーム 4 | ||
| 最大可搬質量(kg) | 各アーム 3(両アームでは6) | ||
| 位置繰り返し精度(mm) | ±0.05 | ||
| アーム1(下アーム) | アーム2(上アーム) | ||
| 最大ストローク | 腕旋回(°) | -170 – +170(JT1) | ‒140 – +500(JT1) |
| 腕旋回(°) | ‒130 – +140(JT2) | ‒140 – +130(JT2) | |
| 腕上下(mm) | 0 – +550(JT3) | 0 – +550(JT3) | |
| 手首回転(°) | -360 – +360(JT4) | ‒360 – +360(JT4) | |
| 制御軸数(軸) | 最大12(標準接続8、オプション4) | ||
| 駆動方式 | フルデジタルサーボ | ||
| 動作方式 | マニュアルモード | 双腕協調動作、単腕独立動作、【補間モード】各軸、ベース座標、ツール座標 | |
| オートモード | 双腕協調動作、単腕独立動作、【補間モード】各軸補間、直線補間 | ||
| 教示方式 | ダイレクト教示方式、タブレットによる簡易教示方式 | ||
| 記憶容量(MB) | 16 | ||
| I/O信号 | 汎用入力(点) | 16(最大80) | |
| 汎用出力(点) | 16(最大80) | ||
| 電源仕様 | AC200-230V±10%、50/60Hz±2%、単相、最大2.0kVA*1 | ||
| D種(第3種)接地(ロボット専用接地)、漏れ電流最大10mA以下 | |||
| 本体質量(kg) | 一体型:210、分離型:100 | ||
| 設置方法 | 床置き | ||
| 設置環境 | 周囲温度(℃) | 5 – 40*2 | |
| 相対湿度(%) | 35 – 85(但し、結露なきこと)*2 | ||
*1:電源投入時及びサーボON時には、瞬時に定常状態の電流の数倍から数十倍の突入電流が発生します。この突入電流により電源電圧の
ドロップが発生する恐れがありますので、瞬間的な負荷の電流に対しても充分余裕のある電源容量を選定してください。
*2:表記範囲外でのご使用については、別途ご相談ください。